Flat Environment Specification 1.0
The specifications in this document are compatible with all versions of Flat.
Flat v5 and higher understand additional specifications (such as color)
described in the Flat Environment Specification 2.0.
How to Build a FLAT Environment
The 2-D environment in which the simulated robot moves is
specified in an environment file. The environment
file contains descriptions of geometric objects such as rectangles,
polygons and circles that represent objects in the environment.
See the files in /u/robot/flat-root/flat3/env/ for examples.
This document describes how to construct an environment file.
Programmer's note: the environment file is parsed by the function
parsePSGdrawObj in the file "gdrawObj.c",
which is called in "xsim.c".
Special note: the sonar simulator does not
recognize arcs, circles or points. The robot will
not be able to sense obstacles constructed from those
objects. When Flat starts running, you will see messages
from the sonar simulator stating that those objects
are ignored. It also ignores strings, but that is
a good thing.
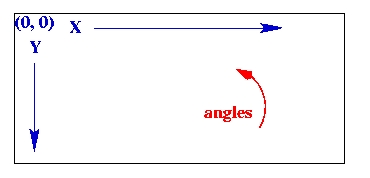
Size and boundaries of the environment
The drawing units are screen pixels and conform to standard drawing
geometry, with (0,0) in the upper left corner of the area, the x
coordinate increasing to the right and the y coordinate increasing
downward. However, angles increase in a counter-clockwise direction,
as in mathematical Geometry. Currently, this only matters with Arcs, which
are not visible to the sonar anyway.
The Simulator window is automatically sized to contain the specified
environment. The robot can escape from the visible environment if there is
an opening along the edge. Normally, you will place a polygon or rectangle
around the entire area so that the robot cannot get out.
Syntax
Each command line must begin with "%_gdraw_ " (note the trailing space).
Any other lines are ignored (treated as comments), including
any Version 2 extensions.
Example file
The following environment is from /u/robot/flat-root/flat3/env/jagged.env,
which generates an environment that looks like this:

%_gdraw_ rect 0 0 300 50 <- the bounding box
%_gdraw_ rect 0 0 50 10 <- the upper left rectangle
%_gdraw_ rect 70 0 30 20
%_gdraw_ poly 120 0 160 0 160 15 120 10
%_gdraw_ rect 170 0 50 15
%_gdraw_ poly 120 50 160 40 170 50 120 50 <- the triangle at the bottom
%_gdraw_ rect 200 40 100 10
Table of graphics commands
All arguments are integers.
| Command |
Arguments |
COMMENTS |
| arc |
x y width height start-angle sweep-angle |
Angles are in degrees, 0 is East, and angles increase counter-clockwise |
| circle |
x y radius |
|
| lines |
x1 y1 x2 y2 ... |
Creates a set of lines.
This is equivalent to the poly command, except
that the last point is not connected to the first point.
Do not leave more than one space after the word 'lines'.
Do not leave more than one space between each number.
|
| point |
x y |
|
| poly |
x y x y ... |
Any number of points can be specified.
The polygon will automatically be closed by
connecting the last point to the first point.
Do not leave more than one space after the word 'poly'.
Do not leave more than one space between each number.
|
| rect |
x y width height |
|
| string |
"characters" x y |
The bottom left edge of the string starts at (x,y). |
[FLAT home]
Author: Micheal
S. Hewett
Email: hewett@cs.utexas.edu
Last Updated: Wednesday, February 24, 1999