CS 377P Assignment 4
Due: March 28th,
2019
You can work in groups. Each group should not have more than 2 students. Each group should do the assignment independently.
Cache-optimized
MMM:
In
class, we described the structure of the optimized MMM code produced by ATLAS.
The "computational heart" of this code is the mini-kernel that
multiplies an NBxNB block of matrix A with an NBxNB block of matrix B into an NBxNB
block of matrix C, where NB is chosen so that the working set of this
computation fits in the L1 cache. The mini-kernel itself is performed by
repeatedly calling a micro-kernel that multiplies an MUx1 column vector
of matrix A with a 1xNU row vector of matrix B into an MUxNU
block of matrix C. The values of MU and NU are chosen so that the micro-kernel
can be performed out of the registers. Pseudocode for the mini-kernel is shown
below (note that this code assumes that NB is a multiple of MU and NU).
//mini-kernel
for(int j = 0; j < NB; j += NU)for (int i = 0; i < NB; i += MU)
load C[i..i+MU-1, j..j+NU-1] into registers
for (int k = 0; k < NB; k++) //micro-kernelload A[i..i+MU-1,k] into registers
load B[k,j..j+NU-1] into registers
multiply A's and B's and add to C'sstore C[i..i+MU-1, j..j+NU-1]
(a) (10
points) Write a function that takes three NxN
matrices as input and uses the straight-forward ikj
3-nested loop version of MMM to perform matrix multiplication. Use the
allocation routine given in the implementation notes to allocate storage for
the three arrays. Run this code to multiply matrices of various sizes (we
recommend not going above 200x200), and draw a graph
of GFlops vs. matrix size. Using PAPI counters,
measure the L1 data-cache misses for the largest matrix size. What fraction of
peak performance do you get for large matrices? Explain your results briefly.
(b) (20 points) To measure the impact of register-blocking without
cache-blocking, implement register-blocking by writing a function for
performing MMM, using the mini-kernel code with NB = N (you should verify that
this implements MMM correctly). You can use the results in the Yotov et al study of the ATLAS
system to determine good values for MU and NU, or you can experiment with
different values to find good values. In this part, do not use vector
operations in your code. Run the code to multiply matrices of various sizes, and draw a graph of GFlops
vs. matrix size (the graph can be superimposed on the graph from part (a)).
Using PAPI counters, measure the L1 data-cache misses for the largest matrix
size. Explain your results briefly. Note for experiments: use values of N that
are multiples of your values for MU and NU; otherwise, you will have to write
some clean-up code to handle leftover pieces of the matrices.
(c) (20 points) Repeat part (b) but this time, use vector intrinsics
to implement the MMM code. Measure the GFlops you
obtain for a range of matrix sizes, and plot of graph of GFlops
vs. matrix size (as before, superimpose this graph on the graphs from (a) and
(b)). Using PAPI counters, measure the L1 data-cache misses for the largest
matrix size. Explain your results briefly.
(d) (30 points) Repeat (c), but this time, implement both register-blocking and
L1 cache-blocking. You will have wrap three loops around the mini-kernel to get
a full MMM. Use any method you wish to determine a good value for NB. Measure
the GFlops you obtain for a range of matrix sizes,
and plot of graph of GFlops vs. matrix size (as
before, superimpose this graph on the graphs from the previous parts). Using
PAPI counters, measure the L1 data-cache misses for the largest matrix size.
Make sure you only use matrices whose size is a multiple of your choice of NB
so you do not need to write clean-up code to handle fractional tiles.. Explain your results briefly.
(e) (15 points) You can improve the performance of your kernel by copying
blocks of data into contiguous storage as explained in the Yotov
et al paper. Implement data copying and produce the performance graph for this
optimized code, superimposing it on the graphs from all the previous parts.
Using PAPI counters, measure the L1 data-cache misses for the largest matrix
size.
(f)
(5 points) Use the Intel Math Kernel Library (MKL) to perform the matrix
multiplications. You can see more information about Intel MKL here
Submission
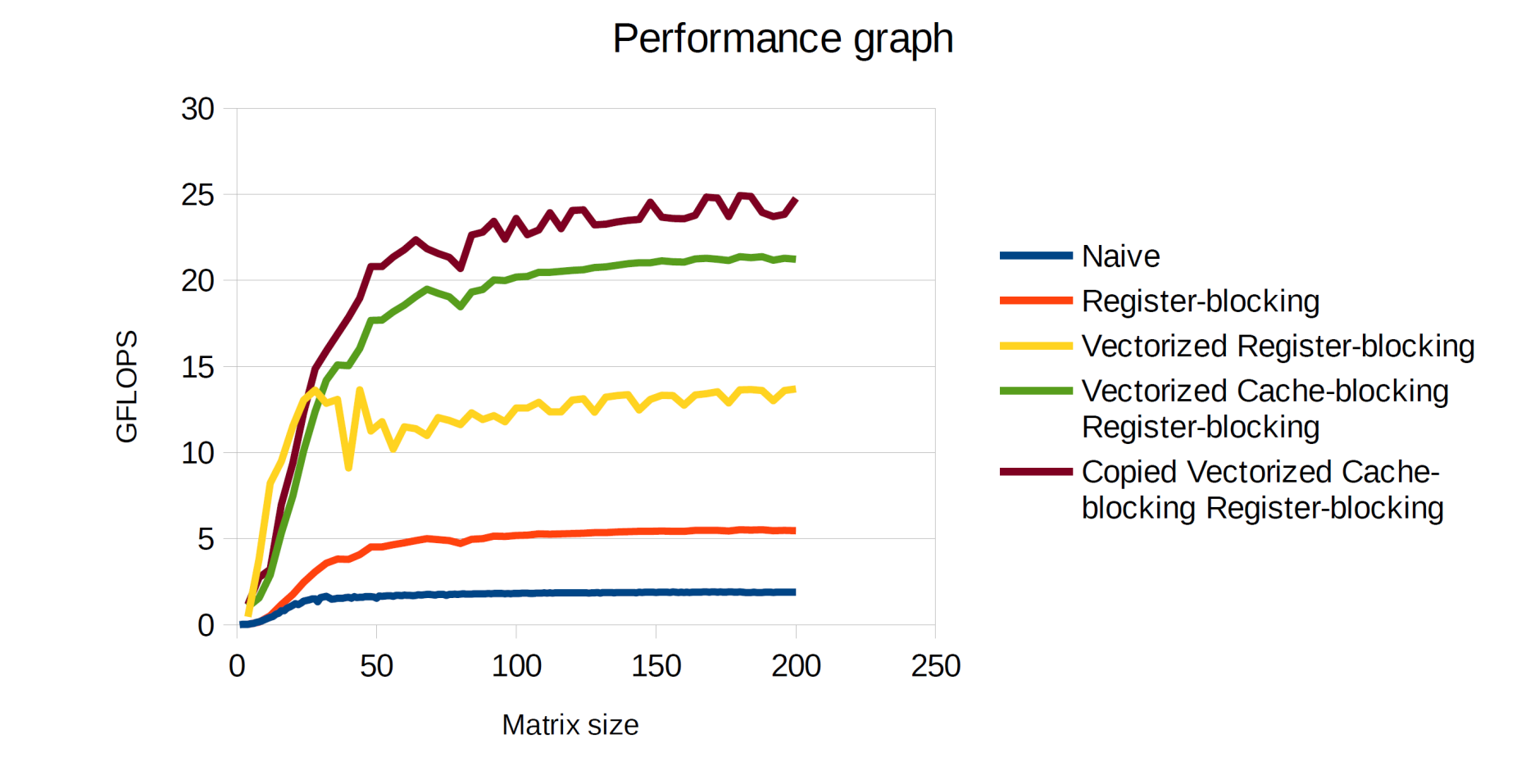
Submit your code, the write-up and the performance graphs.
You can submit a single graph with all the plots, similar to
the one shown below.
Implementation
notes:
1) In the C programming language, a 2-dimensional array of floats is usually
implemented as a 1-dimensional array of 1-dimensional arrays of floats. To
reduce the possibility of conflict misses, it is better to allocate one contiguous
block of storage to hold all the floats, and then create a 1-dimensional row
vector that holds points to the start of each row. You can use the following
code for this purpose: it takes the number of rows (x) and columns (y) as
parameters, and it returns a pointer to the row vector.
float **Allocate2DArray_Offloat(int x, int y)
{
int TypeSize = sizeof(float);
float **ppi = malloc(x*sizeof(float*));
float
*pool = malloc(x*y*TypeSize);
unsigned char *curPtr = pool;
int i;
if (!ppi || !pool)
{ /* Quit if
either allocation failed */
if (ppi) free(ppi);
if (pool) free(pool);
return NULL;
}
/* Create row vector */
for(i = 0; i < x; i++)
{
*(ppi + i) = curPtr;
curPtr += y*TypeSize;
}
return ppi;
}
2) Here is a nice paper on coding guidelines for
writing "portable assembly language programs" in the C language.
3) You can also read an article about the GotoBLAS by Goto and van de Geijn.
4) To give you an idea of what to shoot for, here are some
results we obtained for the different versions of MMM. Your mileage may vary
but the trends should be similar. We have not shown the MKL line.